mBot 2, le dernier robot de Makeblock, est arrivé chez CréaCode Lab.
Les connaisseurs du premier modèle du nom ne seront pas dépaysés par l’aspect de son évolution.
- Châssis en aluminium bleu, légèrement différent par ses dimensions et sa couleur.
- Deux grandes roues arrières motrices, une petite roue (presque) folle à l’avant.
- Cerveau en carapace sur le dos.
- Deux yeux à l’avant.
- Capteurs sous le châssis à l’avant.
Même la boîte a des airs de parentalité avec la version 1 du célèbre robot.
Pourquoi donc se lancer dans l’achat de cette nouveauté (presque) pareil ?
Procédons au montage pour essayer de savoir ce qui se cache derrière ce robot bleu
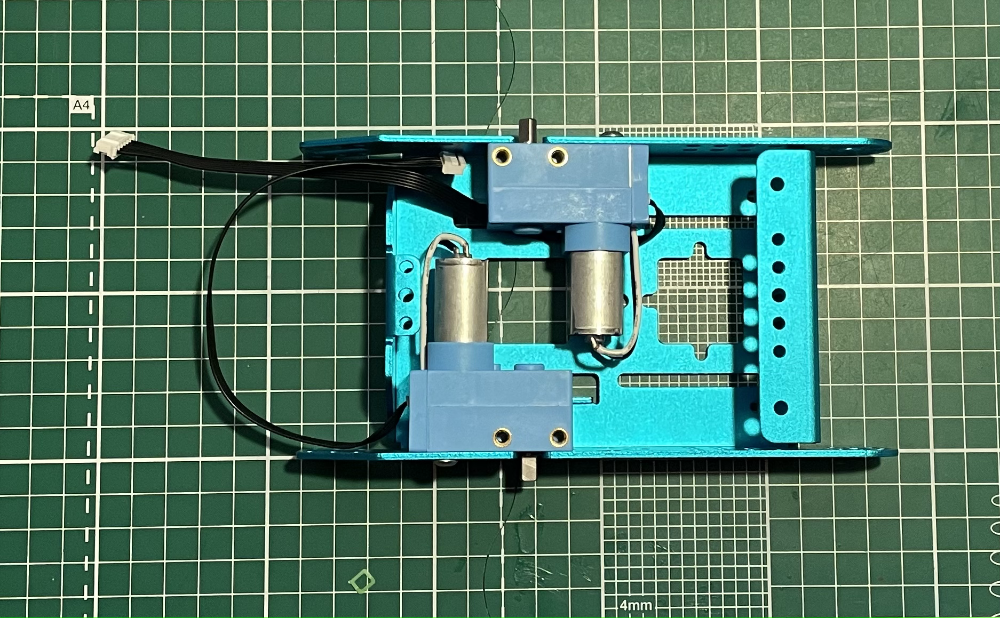
Première étape : châssis et moteurs
La châssis est 2 millimètres plus large et 9 millimètres plus long, certainement pour intégrer le nouveau cerveau de la bête, le Cyber Pi. Nous y reviendrons.
Les moteurs plus qualitatifs que les précédents amèneront probablement du couple, de la puissance et de la précision lors des déplacements. La fixation de ceux-ci est également bien plus sûre.
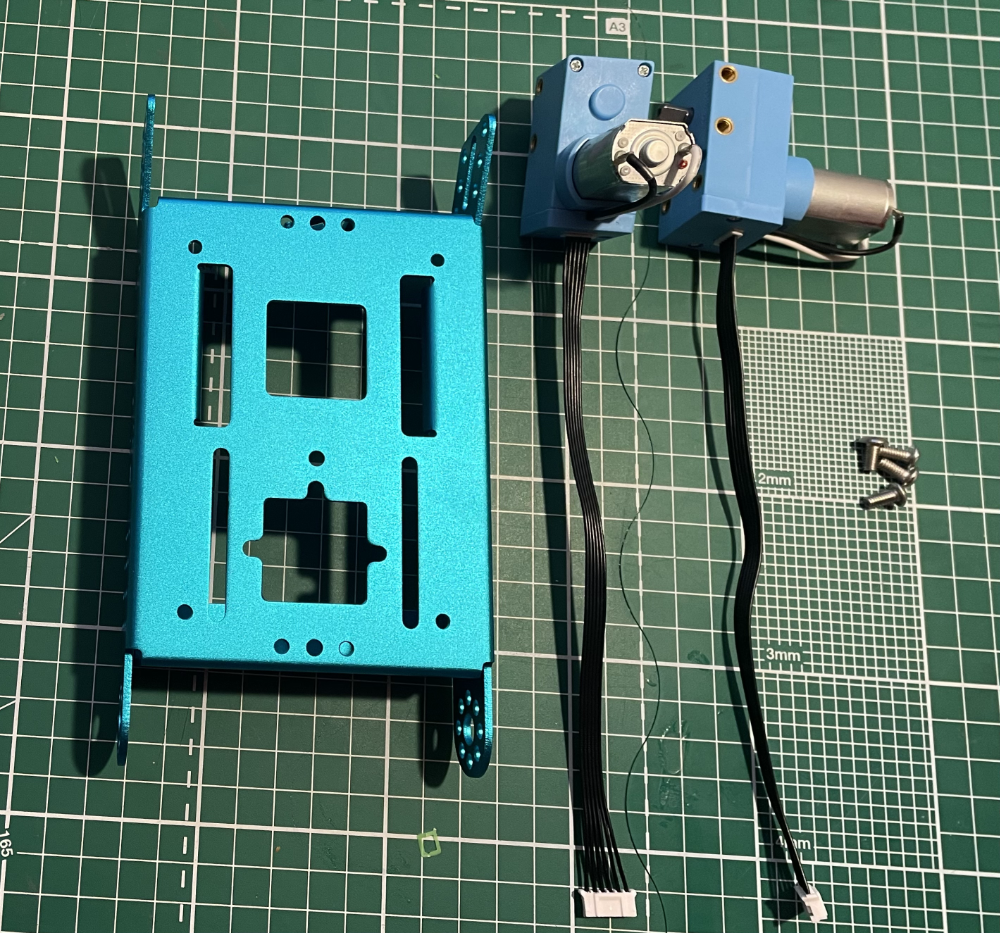
De par leur conception, les moteurs se retrouvent en position transversal et non plus longitudinal comme précédemment.
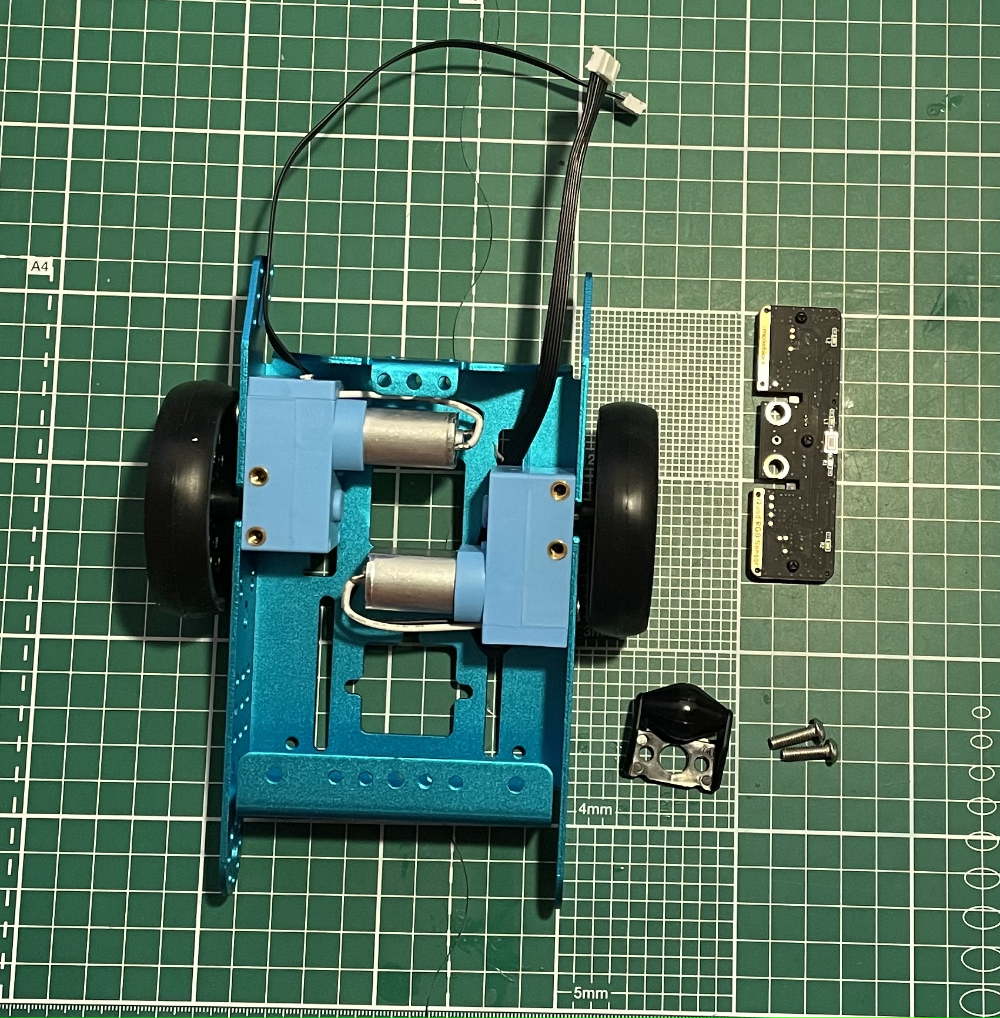
Deuxième étape : roues et capteurs bas
Les roues motrices sont, à part la couleur, strictement les mêmes. Elles permettaient une bonne réactivé du robot. Pas de doute que cela perdure.
La roue folle est légèrement plus arrondi. Rien de fou justement. Peut-être pour davantage de maniabilité. A vérifier.
En revanche, le capteur sous châssis évolue largement. L’ancien capteur de ligne a double senseur prend du galon en multipliant le nombre de senseurs par deux et s’offrant une vision RVB (ou RGB).
De même, la connectique évolue. Les RJ11 cèdent leur place à des fiches Picoblade quatre fils pour les capteurs, six fils pour les moteurs.
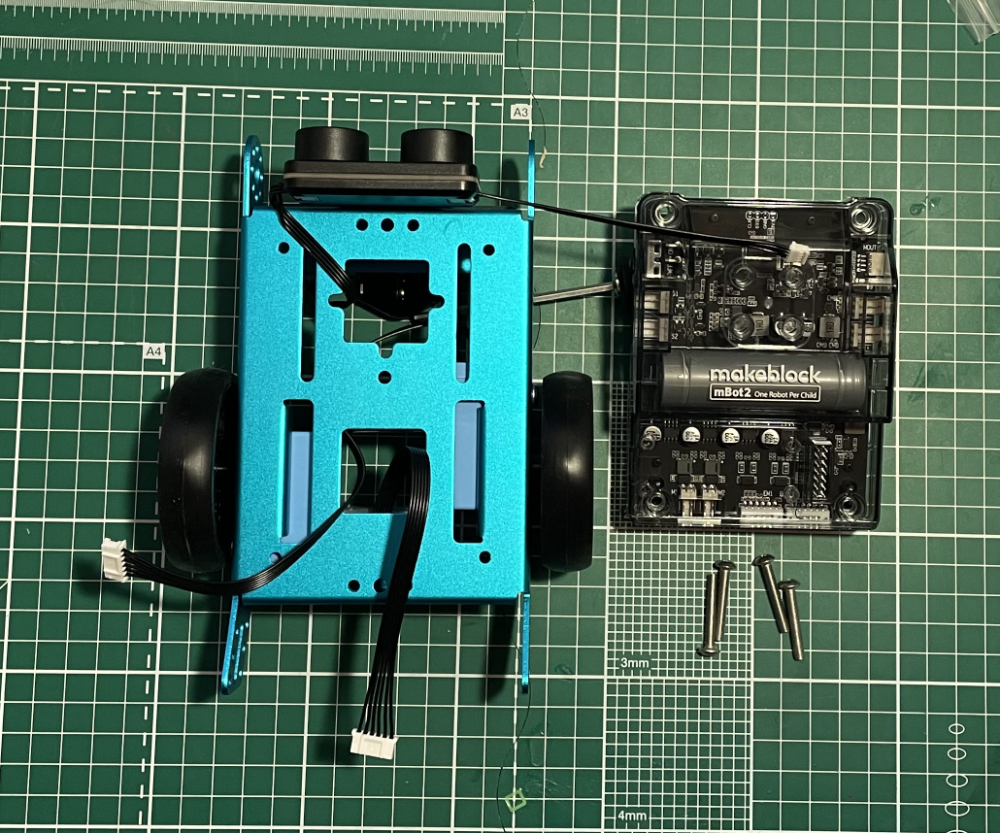
Troisième étape : Les yeux !
Le robot se pare comme son prédécesseur d’un capteur ultrason fixé d’origine à l’avant du châssis.
Le capteur évolue avec une livrée plus qualitative et des LED.
La connectique évolue comme cité précédemment.

Quatrième étape : Le cerveau carapace
Certainement le plus grand changement avec l’intégration de la nouvelle CyberPi.
Cette dernière intègre un microprocesseur ESP32 pour une communication sans fil et compatible avec la programmation par blocs type Scratch ou par Python. S’y trouve également un écran couleur de 1,44 pouces, un joystick et deux boutons.
L’interrupteur on/off se trouve sur la gauche de la coque de protection qui abrite l’ensemble des connecteurs et maintenant, une batterie.
Prochaine étape ?
Tester la programmation de cette petite bête.